
Autonomous UGV Development
Three-phase autonomous tracked vehicle: GPS waypoint navigation, encoder-based dead reckoning, and LiDAR localization with ROS2/Nav2.
Code Research Hardware C++ Matlab
View Project
Three-phase autonomous tracked vehicle: GPS waypoint navigation, encoder-based dead reckoning, and LiDAR localization with ROS2/Nav2.

Drivetrain lead for UTA RoboMasters across three robots: designing suspension, chassis, and wheel systems for ARC North America at Purdue.

Designed and implemented a plan to bring an innovative shaker bottle to market.
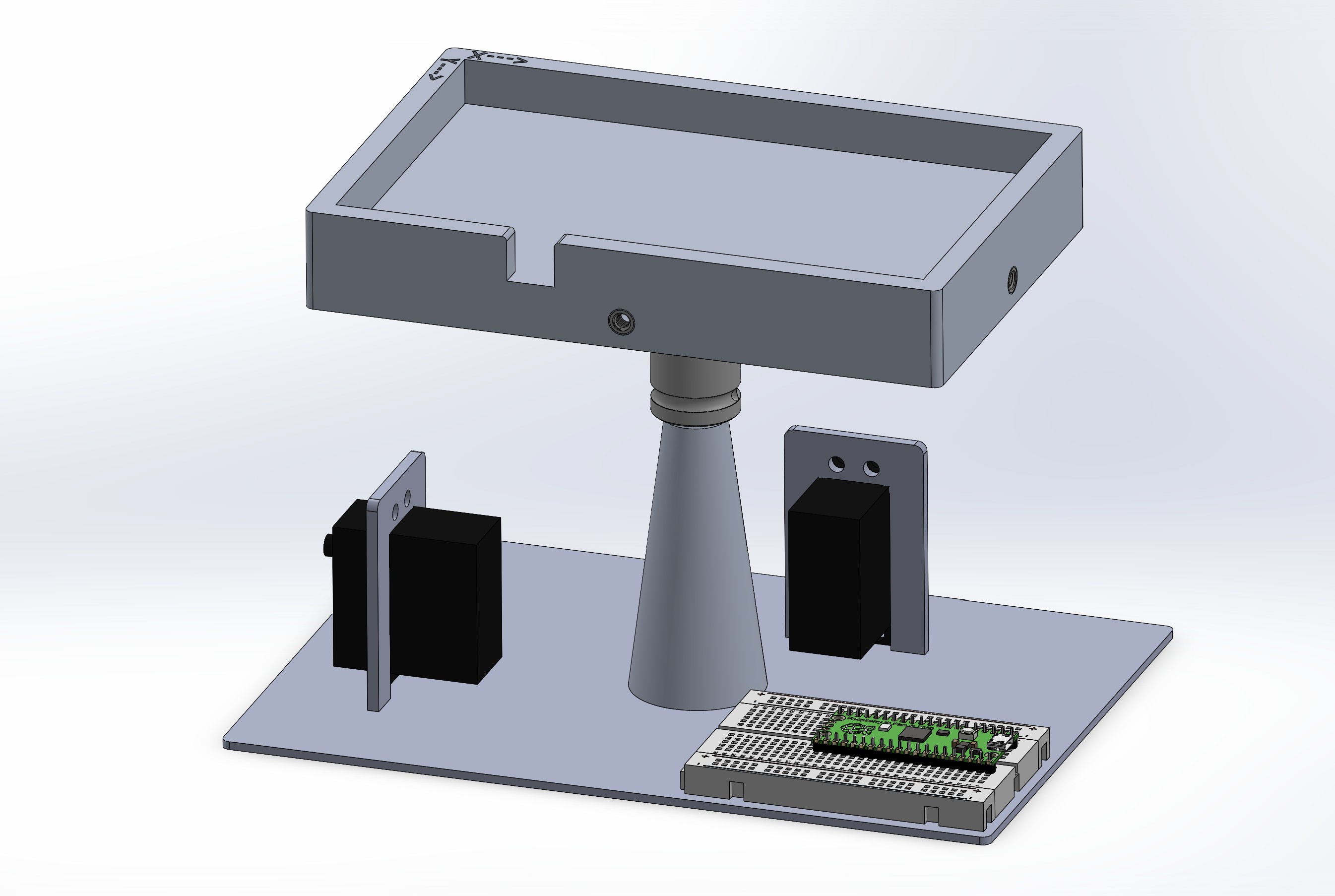
Developed A Raspberry Pi based PWM and PID controller for a self-balancing platform
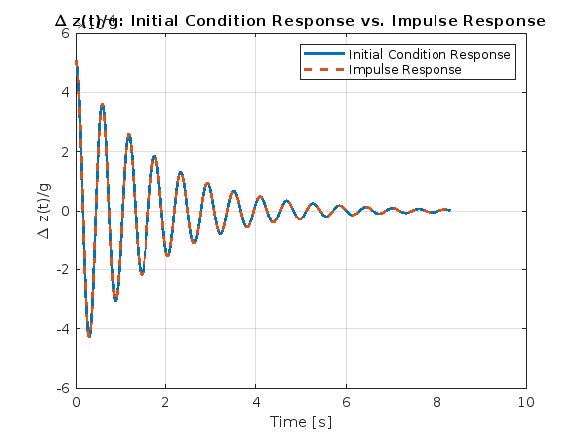
Dynamic modeling and stability analysis of pneumatic air cushion suspension using state-space methods and control theory

Analysis of coupled thermal conduction and convection in rod-sphere systems using distributed parameter modeling and symbolic mathematics
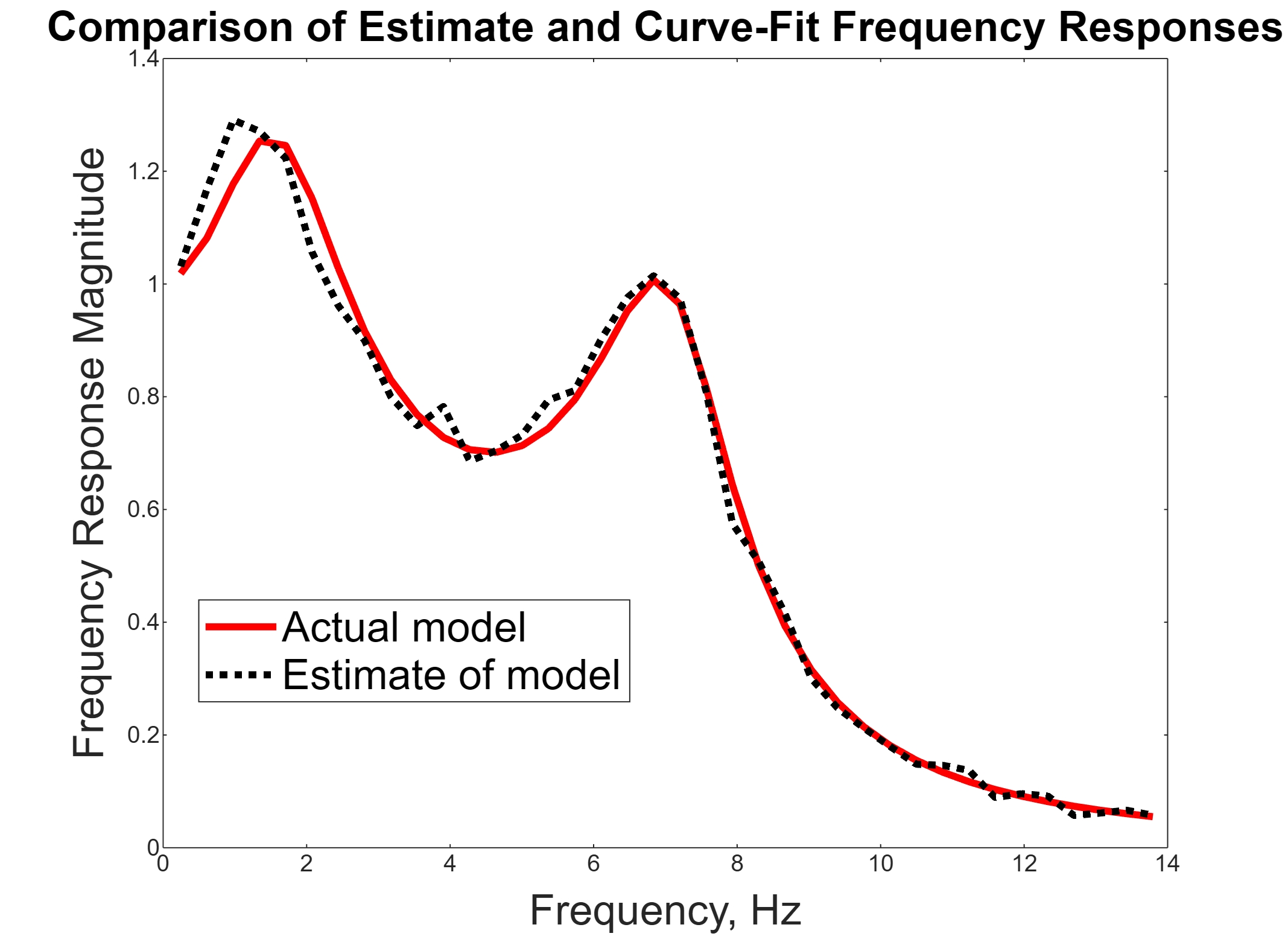
Developed a method to estimate suspension system parameters using experimental data and modeling.
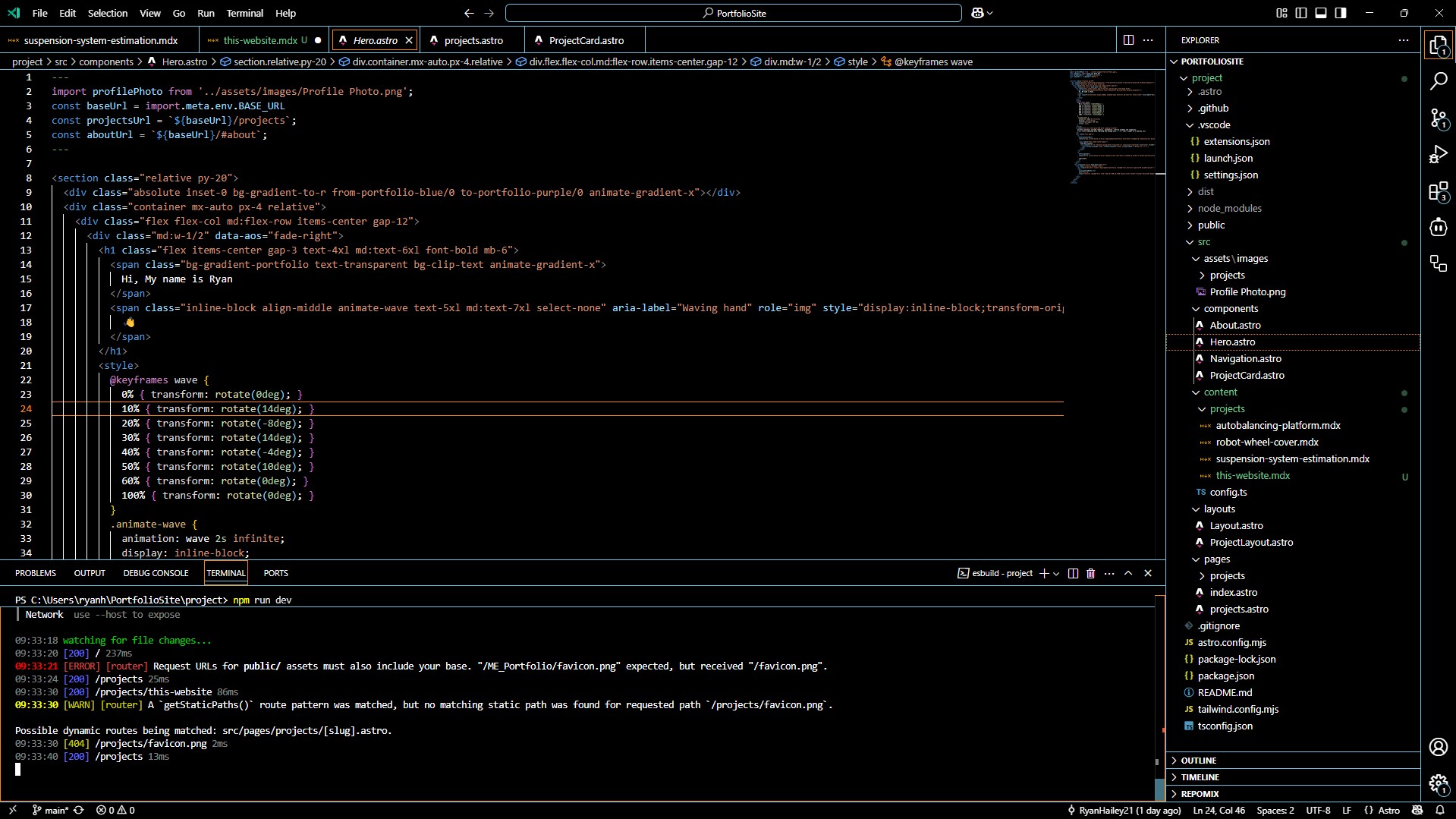
Custom coded website built with Astro Framework
No projects match the selected filters.