RoboMasters Robot Development
Drivetrain lead for UTA RoboMasters across three robots: designing suspension, chassis, and wheel systems for ARC North America at Purdue.

Overview
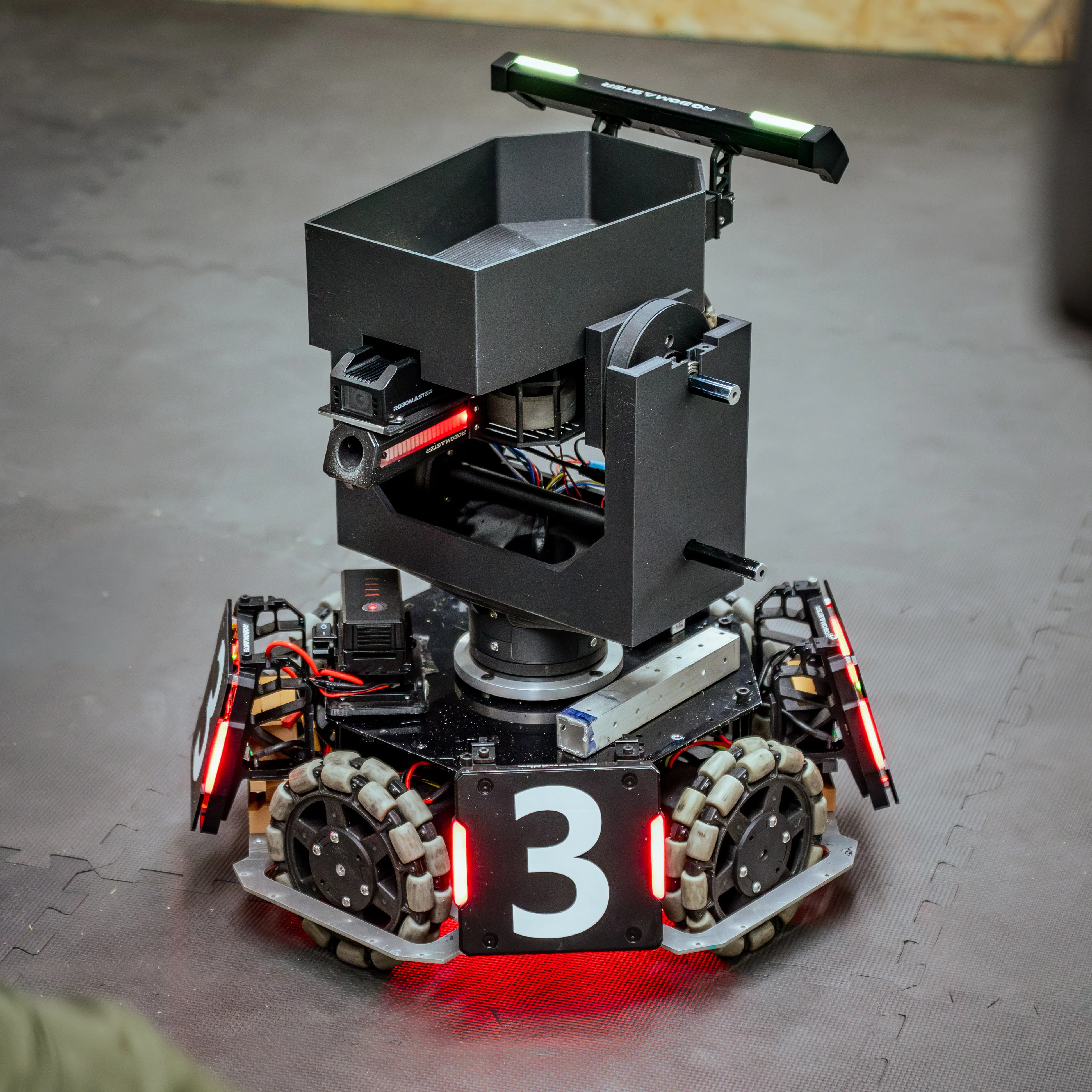
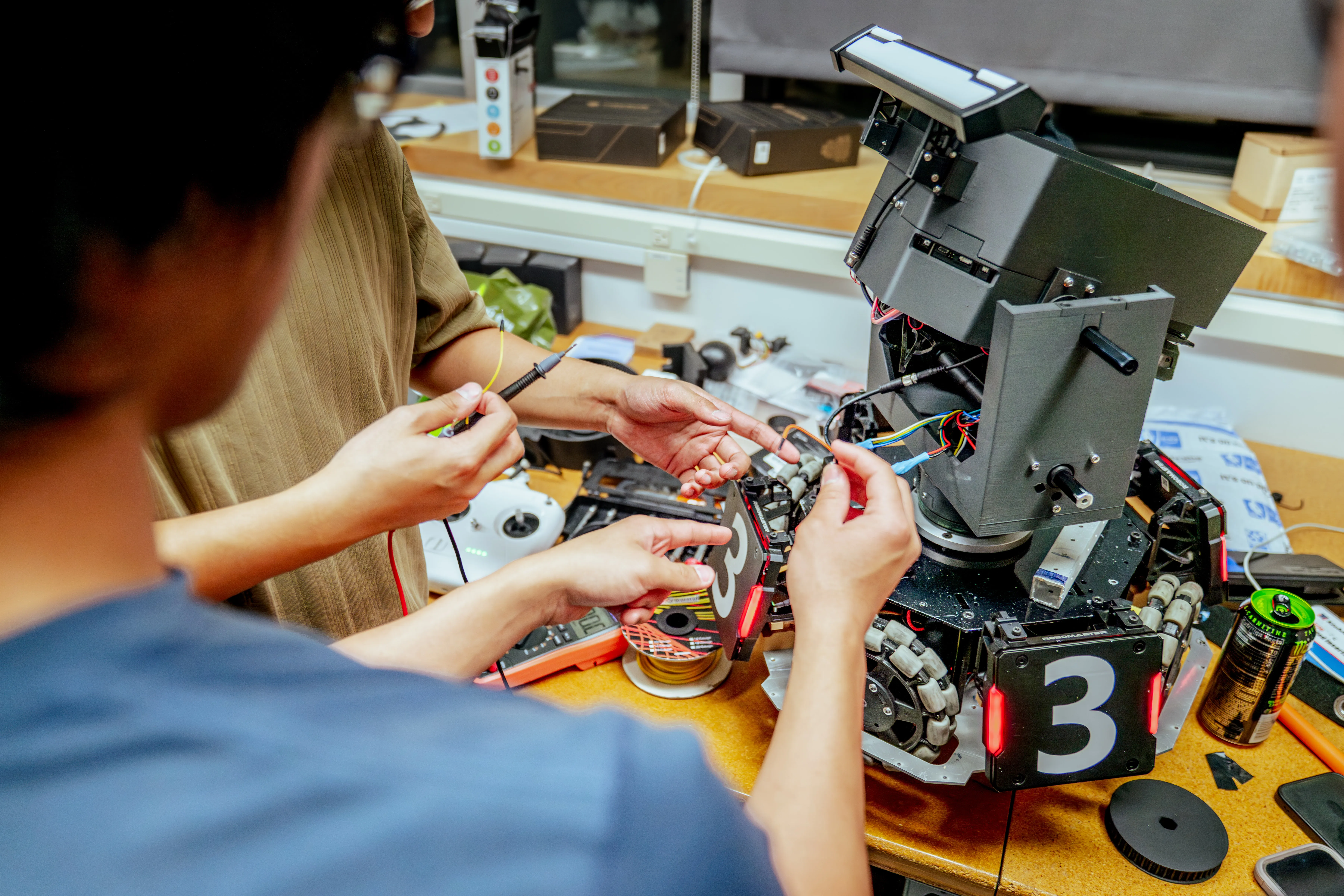
The RoboMasters competition, run by DJI, challenges university teams to design, build, and operate a fleet of combat robots that battle in a structured arena game. UTA’s team competes with a roster of three robots: a Standard, a Hero, and a Sentry each with distinct roles, drive requirements, and mechanical constraints.
As Drivetrain Lead, I am responsible for the complete lower chassis of all three robots. This covers suspension design and analysis, chassis geometry, wheel and motor mounting, manufacturing, assembly, and field repairs. The team is targeting the ARC North America competition at Purdue this summer.
Role and Responsibilities
Taking on the drivetrain lead role meant owning every aspect of how these robots move. Day-to-day responsibilities include:
- Suspension design: Modeling and iterating suspension geometry in SolidWorks, Onshape, and Fusion 360; running structural analysis in Ansys to validate load cases
- Chassis design: Laying out the lower frame to meet competition weight limits, packaging constraints, and center-of-mass targets
- Manufacturing: 3D printing structural and cosmetic components, working with the machine shop for metal parts, and managing print orientation and infill for structural integrity
- Assembly: Building up drivetrains from scratch, fitting suspension arms, seating motors, mounting wheel assemblies, and routing wiring
- Testing: Field-testing robots for drive response, handling, and durability; tuning suspension geometry based on observed behavior
- Repairs: Diagnosing and fixing drivetrain failures under time pressure between practice sessions and competition runs
- Team leadership: Coordinating the drivetrain sub-team, assigning tasks, unblocking teammates, and keeping build progress on schedule

Drivetrain Design
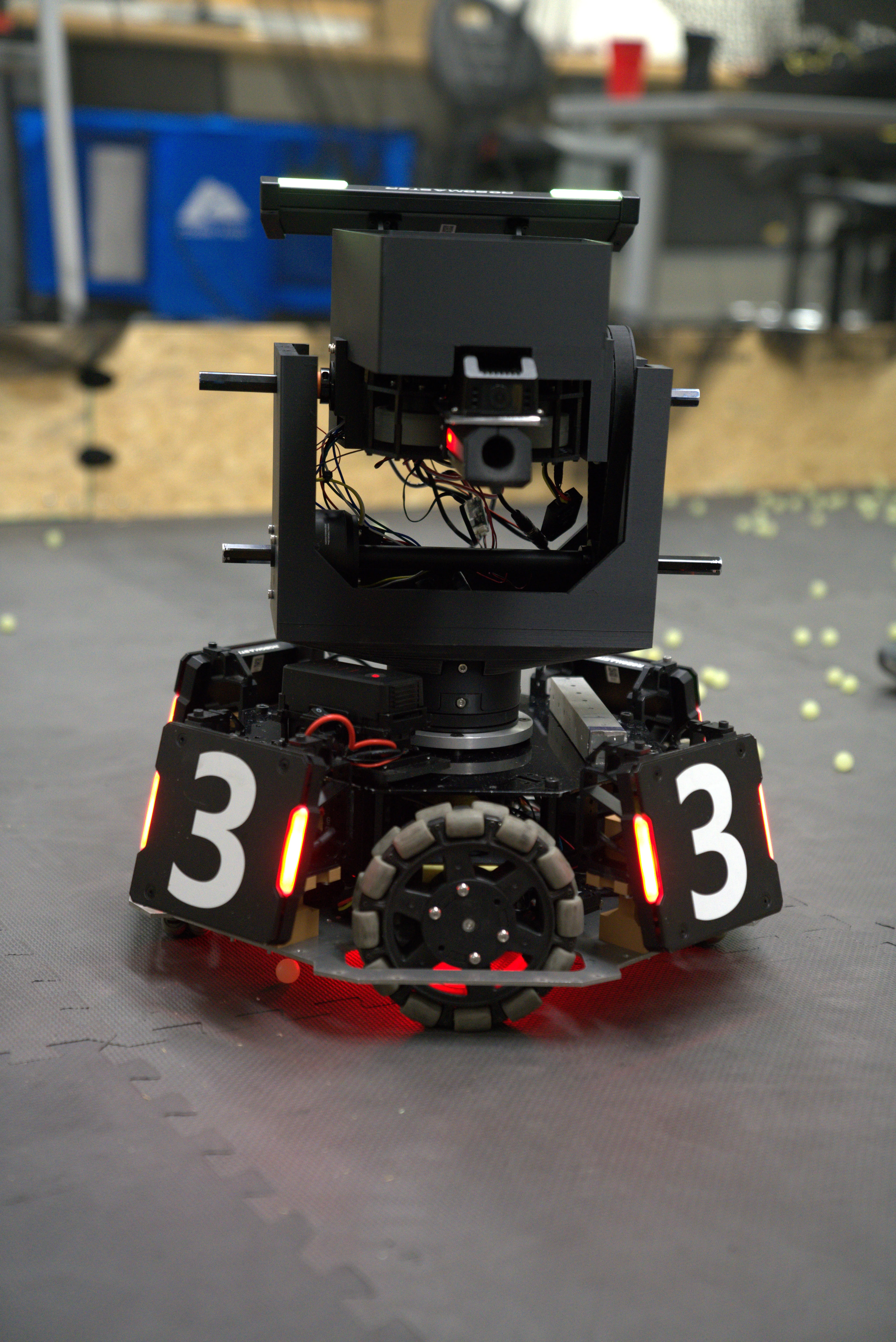
All three robots use mecanum wheels for omnidirectional movement, which places unique lateral and diagonal load demands on the suspension and wheel mounts compared to a conventional differential drive. Each wheel hub is independently suspended to maintain ground contact across uneven arena surfaces and absorb impacts from combat.
Key design considerations across all three robots:
- Suspension geometry: Travel, preload, and spring rate are tuned per-robot based on weight and expected loading
- Chassis stiffness: Frame members are sized to resist torsion from mecanum lateral forces without adding unnecessary weight
- Serviceability: Wheel assemblies are designed to be removed and replaced quickly during competition downtime
- Weight budget: Drivetrain mass is tracked against the competition weight limit, with components iterated in CAD before committing to print or fab
CAD and Analysis
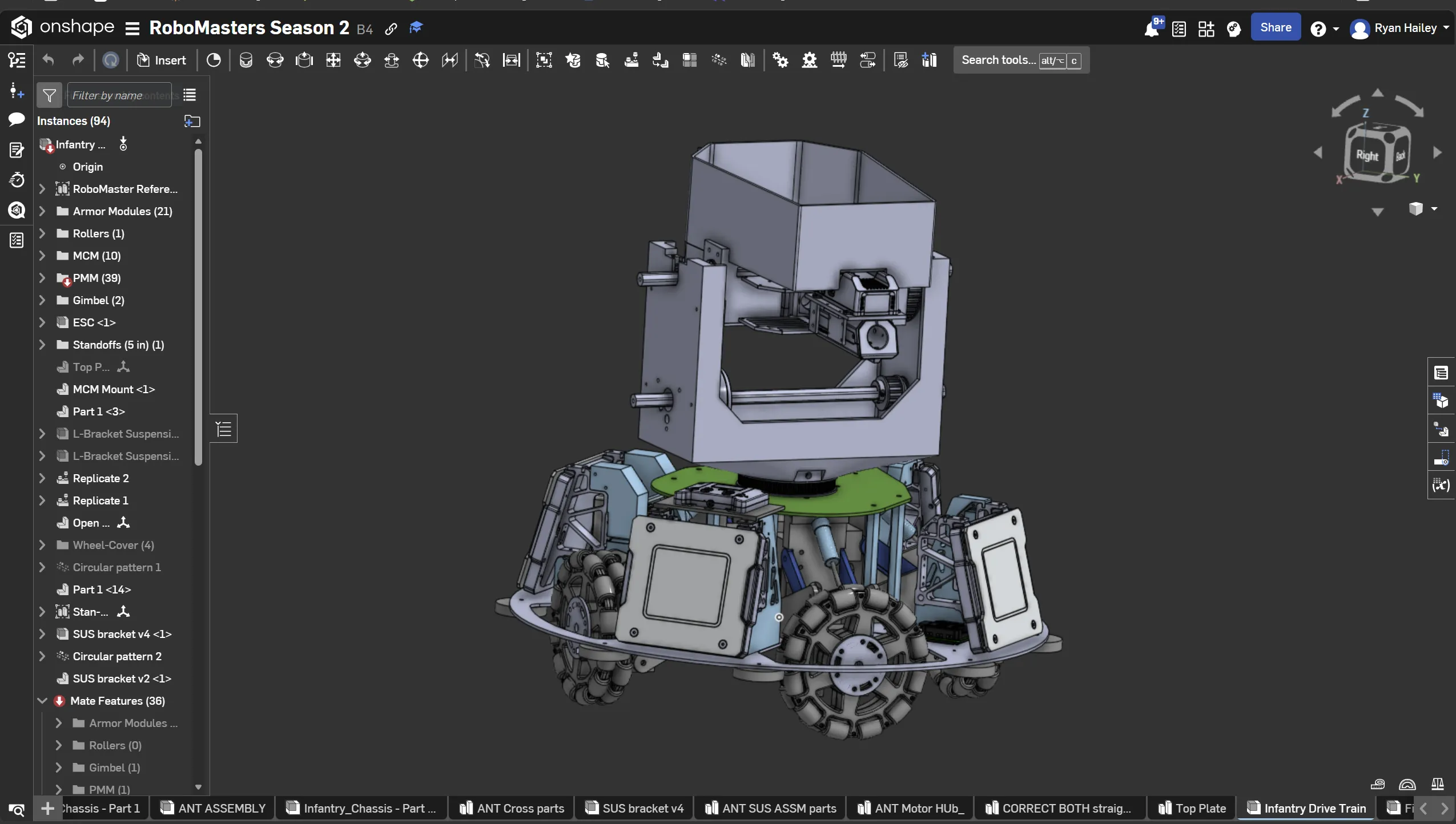
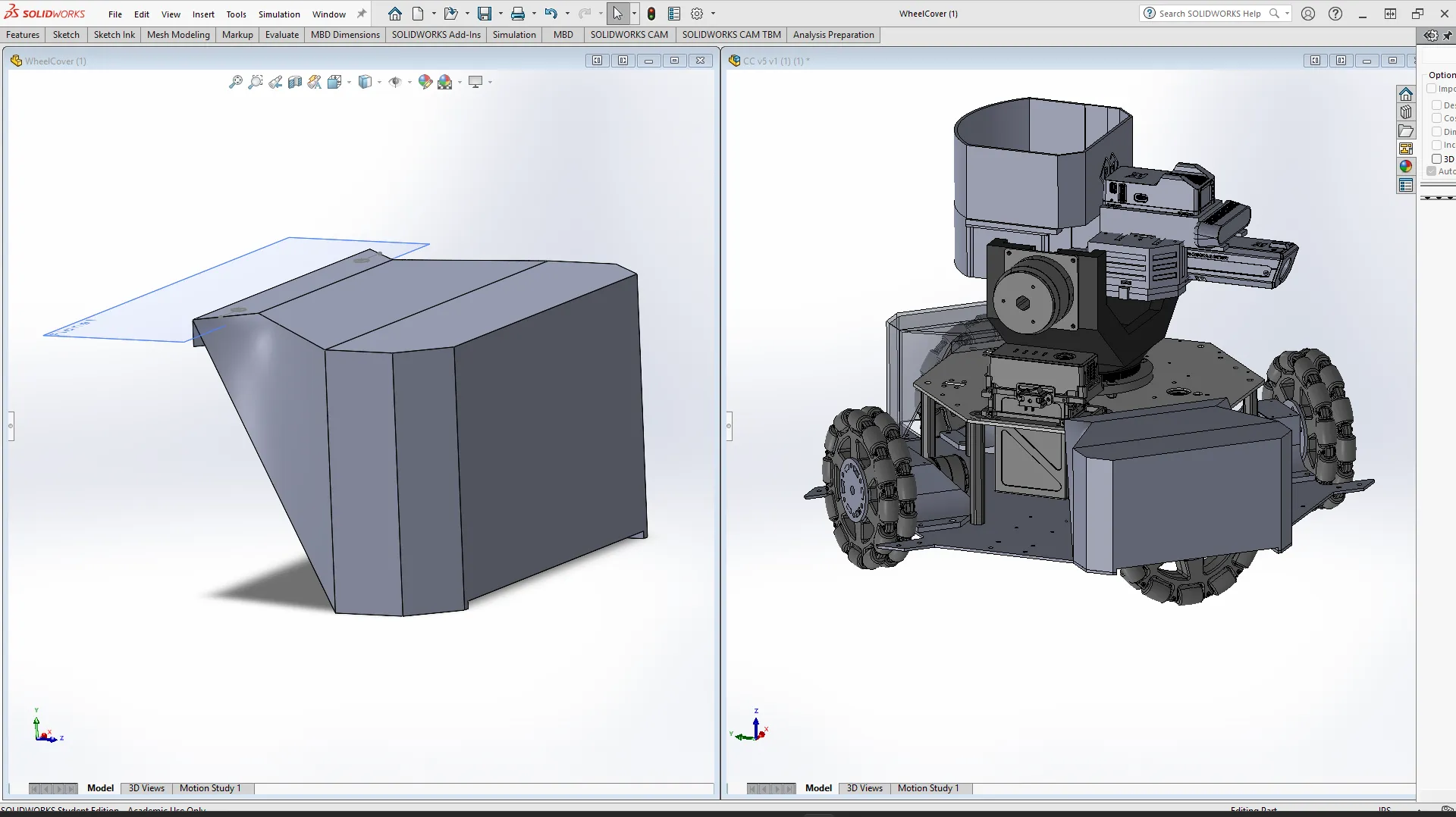
Design work is split across tools depending on the task. SolidWorks is used for detailed part modeling and assemblies where parametric control and mate constraints are critical. Onshape supports collaborative work when multiple team members need to access and edit the same assembly simultaneously. Fusion 360 is used for organic geometry and integrated CAM when parts go directly to the machine shop.
Structural validation is done in Ansys, with FEA used to check stress concentrations in suspension arms and chassis mounting points under worst-case loading. This has caught several design issues before parts were manufactured.
Manufacturing and Assembly
Most drivetrain components are 3D printed on a Bambu printer. Print orientation is chosen to align layer lines with primary load paths, and infill and wall count are adjusted based on Ansys results. Metal parts (shafts, brackets, hardware) are sourced or machined in the campus shop.

Assembly involves close coordination with the electrical sub-team to route motor and encoder wiring through the chassis without interfering with suspension travel. Clearance checks are done in the CAD assembly before physical build to catch interference early.
Team and Competition
The team is preparing all three robots for ARC North America at Purdue, where they will compete against university teams from across the continent. Getting three distinct robots to competition-ready condition simultaneously requires careful prioritization: critical drivetrain systems are built and tested first, with cosmetic and secondary components completed as time allows.